-
五軸機械手的編程方式主要有以下幾種: 一��、示教編程 在線示教 這是一種比較直觀的編程方式����。操作人員通過手動操縱機械手的末端執(zhí)行器�,使其按照預定的動作路徑運動。在運動過程中,機械手控制系統(tǒng)會記錄下各個軸的位置��、速度和動作順序等信息�����。
發(fā)布時間:2024-10-29 點擊次數(shù):10
-
五軸機械手的程序調(diào)試是一個涉及多個步驟的過程�,主要包括程序編寫、參數(shù)調(diào)整�、校準以及測試驗證等。以下是一個概括性的調(diào)試流程: 一�、程序編寫 新建程序:首先,在機械手控制系統(tǒng)的界面上���,新建一個程序文件�����,并為其命名���。 編輯程序:根據(jù)機械
發(fā)布時間:2024-08-23 點擊次數(shù):29
-
五軸機械手通?�?梢愿鶕?jù)以下幾個標準進行分類: 關(guān)節(jié)結(jié)構(gòu): 串聯(lián)型五軸機械手并聯(lián)型五軸機械手 工作空間形狀: 卡特式五軸機械手關(guān)節(jié)式五軸機械手環(huán)形五軸機械手 驅(qū)動方式: 電機驅(qū)動型五軸機械手液壓驅(qū)動型五軸機械手氣動驅(qū)動型五軸機
發(fā)布時間:2024-07-31 點擊次數(shù):17
-
注塑行業(yè)中����,五軸伺服機械手相比于傳統(tǒng)的三軸伺服機械手����,擁有以下顯著的好處和優(yōu)點:1�����、更高的精度:五軸伺服機械手由于擁有更多的伺服驅(qū)動軸(比三軸多兩個)�,能夠在三維空間內(nèi)更準確地定位和移動,實現(xiàn)更精細的控制和操作�。2、更快的速度:五軸系統(tǒng)可以
發(fā)布時間:2024-07-11 點擊次數(shù):18
-
注塑五軸機械手又名五軸機械手或五軸伺服機械手���,注塑行業(yè)使用的五軸伺服機械手中的“五軸”通常指的是以下五個運動軸:1.主臂引拔軸:控制機械手的主體部分沿前后方向移動����,實現(xiàn)從注塑機模具中取出制品或水口的動作�����。2.主臂上下軸:負責機械手主體部分的
發(fā)布時間:2024-06-12 點擊次數(shù):51
-
教導五軸機械手的方法可以大致分為以下幾種: 1.手動示教:通過手動機械臂的關(guān)節(jié)�����,將其移動到所需的位置并記錄下關(guān)節(jié)角度或位置信息��。這種方法簡單直觀�,但需要較長的時間和經(jīng)驗以確保準確性��?���! ?.示教器示教:使用專門的示教器設(shè)備,通過示
發(fā)布時間:2024-02-19 點擊次數(shù):40
-
五軸機械手的跟隨功能是指機械手可以根據(jù)預定的路徑或者外部指令實現(xiàn)對物體或工具的跟隨運動��。該功能使得機械手可以自動適應不規(guī)則的工件形狀或動態(tài)變化的工作環(huán)境���?����! 【唧w而言�����,五軸機械手的跟隨功能依賴于其控制系統(tǒng)和傳感器的配合�。以下是一些常見的
發(fā)布時間:2024-01-22 點擊次數(shù):63
-
五軸機械手的信號檢測在工業(yè)自動化中起著關(guān)鍵作用����。它主要用于檢測和監(jiān)控機械手在工作過程中的各種信號,以便實現(xiàn)的控制和運動����。以下是一些常見的信號檢測用途: 1.位置檢測:通過檢測機械手的位置信號,可以確保每個軸的位置�,從而實現(xiàn)運動控制。
發(fā)布時間:2024-01-17 點擊次數(shù):60
-
五軸機械手和三軸機械手的區(qū)別主要在于其工作范圍和靈活性��?�! ∪S機械手: 1.工作范圍:三軸機械手通常由基座、腰部和手腕組成��,可以在三個軸向上運動�����,即上下��、前后和左右���。它們可以完成基本的二維平面運動和一定程度的轉(zhuǎn)動,適用于簡單的直
發(fā)布時間:2024-01-13 點擊次數(shù):104
-
五軸機械手包括主臂��、副臂和手腕等部件�����,調(diào)整這些部件需要按照具體的機械手型號和手冊進行�����。下面是一般情況下對五軸機械手主臂和副臂進行調(diào)整的一般步驟: 1.松開固定螺栓:首先����,根據(jù)機械手的手冊�����,找到主臂和副臂的固定螺栓�,松開這些螺栓���,以便
發(fā)布時間:2024-01-13 點擊次數(shù):87
-
接注塑機的方法通常取決于具體的生產(chǎn)場景和工藝要求����,下面是一種常見的五軸機械手接注塑機的方法: 1.位置布置:首先確定五軸機械手的位置布置,通常需要考慮到機械手可以覆蓋整個注塑機的工作區(qū)域�,并且能夠準確地取放模具和成品?��! ?.程序
發(fā)布時間:2024-01-05 點擊次數(shù):109
-
五軸機械手是一種具有復雜運動和控制系統(tǒng)的機械裝置���,調(diào)試是確保機械手正常工作的關(guān)鍵步驟。以下是一般的五軸機械手調(diào)試方法的概述: 1.基礎(chǔ)設(shè)置: 確定機械手的安裝位置和朝向,并進行機械結(jié)構(gòu)的調(diào)整和修正�����?�! 〈_定機械手工作區(qū)域和邊界
發(fā)布時間:2024-01-04 點擊次數(shù):123
-
五軸機械手的視覺定位方法通常涉及使用攝像頭和圖像處理算法來確定物體的位置和姿態(tài)����。以下是一種常見的五軸機械手視覺定位方法的基本步驟: 1.攝像頭獲取圖像:首先,攝像頭拍攝包含要處理的物體的圖像���。這些圖像可以是在機械手范圍內(nèi)的物體,例如
發(fā)布時間:2023-12-30 點擊次數(shù):60
-
五軸機械手的堆疊通常需要進行以下設(shè)置: 1.定義堆疊位置:確定產(chǎn)品堆疊的位置���,包括堆疊的高度���、堆疊的角度和堆疊的位置。這些參數(shù)需要根據(jù)具體的產(chǎn)品和堆疊方式來確定?�! ?.確定堆疊順序:確定產(chǎn)品堆疊的順序�,通常是先進先出(FIFO)
發(fā)布時間:2023-12-23 點擊次數(shù):106
-
如果五軸機械手使用執(zhí)行出現(xiàn)故障,以下是一些可能的解決方法: 1.檢查電源和電源線��,確保機械手有足夠的電力供應�。檢查電源線是否插緊,避免電源不穩(wěn)定造成故障�。 2.檢查信號線和控制器連接����。確保信號線插緊且未損壞,避免信號丟失導致機械
發(fā)布時間:2023-12-23 點擊次數(shù):56
-
首先����,五軸機械手出現(xiàn)故障可能有很多種原因,以下是一些常見的故障和解決方法: 1.電源問題:確保機械手的電源正常連接并供電���,檢查電源線是否損壞或松動�。如果需要�����,嘗試連接到其他電源插座來排除電源問題?����! ?.控制系統(tǒng)故障:檢查控制系統(tǒng)
發(fā)布時間:2023-12-16 點擊次數(shù):96
-
選擇五軸機械手副臂時�����,需要考慮以下幾個因素: 1.負載能力:根據(jù)你的應用需求��,選擇能夠承載所需負載的副臂����。確保副臂能夠穩(wěn)定地目標物體����。 2.工作范圍:考慮副臂的工作半徑和運動范圍����,確保其能夠覆蓋到你需要處理的工件或空間�����?����! ?.
發(fā)布時間:2023-12-15 點擊次數(shù):50
-
設(shè)置五軸機械手的雙程序可以實現(xiàn)兩個不同的程序之間的切換和執(zhí)行�。以下是設(shè)置雙程序的一般步驟: 1.編寫兩個獨立的程序:首先,編寫兩個獨立的程序��,分別描述每個程序需要完成的任務和動作序列���。確保每個程序都能夠在獨立運行時完成預期的工作���。
發(fā)布時間:2023-12-08 點擊次數(shù):70
-
五軸機械手因其靈活性�、多功能性和高精度而深受廣泛使用。以下是五軸機械手受歡迎的原因: 1.多自由度:五軸機械手具有五個獨立的旋轉(zhuǎn)軸�����,可以在多個方向上進行運動和定位。這種多自由度的設(shè)計使得機械手能夠執(zhí)行復雜的動作和任務�,例如彎曲、旋轉(zhuǎn)
發(fā)布時間:2023-12-08 點擊次數(shù):57
-
五軸機械手的起點位置設(shè)置取決于具體的控制系統(tǒng)和使用場景���,一般有以下幾種方式來設(shè)置起點位置: 1.示教模式:某些機械手控制系統(tǒng)支持示教模式�����,用戶可以手動運行機械手����,將其移動到所需的起點位置��。在示教模式下���,機械手的位置和姿態(tài)信息將被記錄
發(fā)布時間:2023-12-01 點擊次數(shù):70
-
五軸機械手的跟隨功能是指機械手能夠根據(jù)特定的路徑或目標對象進行動態(tài)跟隨和運動����。這項功能使得機械手能夠?qū)崿F(xiàn)對移動目標的追蹤和工作,提高了機械手的靈活性和自動化能力�����?��! 【唧w來說���,五軸機械手的跟隨功能包括以下幾個方面: 1.路徑跟蹤:機
發(fā)布時間:2023-12-01 點擊次數(shù):91
-
當五軸機械手在吸取產(chǎn)品時發(fā)出報警時,可能存在以下問題: 1.吸嘴故障:吸嘴可能存在堵塞�、磨損或松動等問題,導致無法正常吸取產(chǎn)品或吸取不穩(wěn)定�����。這可能是機械手報警的原因之一�。 2.真空系統(tǒng)故障:機械手通常使用真空系統(tǒng)進行吸取產(chǎn)品����,如
發(fā)布時間:2023-11-25 點擊次數(shù):118
-
五軸機械手的夾水口位置調(diào)整通常需要依據(jù)具體的機械手型號和工作需求進行。下面是一般的調(diào)整步驟: 1.查閱機械手的手冊:首先����,您需要查閱機械手的手冊���,了解關(guān)于夾水口位置調(diào)整的具體說明和步驟。不同的機械手型號和品牌可能有不同的調(diào)整方法和要
發(fā)布時間:2023-11-24 點擊次數(shù):52
-
五軸機械手的信號檢測可以用來檢測機械手的運行狀態(tài)���,例如夾具的開關(guān)狀態(tài)�、橫行姿勢��、原點復歸�����、上下復歸姿勢���、水平待機�����、鎖模到位��、安全門檢測和壓力檢測等�,以確保機械手在運行過程中的穩(wěn)定性和安全性��?��! ≡龠x擇點擊屏幕中“信號設(shè)定”按鈕可進入信號
發(fā)布時間:2023-10-12 點擊次數(shù):58
-
五軸機械手的C軸是指機械手主臂治具水平軸和垂直軸,五軸機械手就是指有五個方向軸(坐標軸)可以單獨或聯(lián)動進行調(diào)整和控制的自動機床或智能機床�。大多數(shù)習慣采用X���、Y��、Z三個字母的坐標系來表示��,而C軸則表示不是正反雙向旋轉(zhuǎn)軸��,僅僅只是正反雙向調(diào)
發(fā)布時間:2023-09-27 點擊次數(shù):121
-
五軸機械手的功率大小會受到多個因素的影響�,包括機械手的尺寸���、載荷能力���、運動速度以及所執(zhí)行的工作類型等?�! ⊥ǔG闆r下���,五軸機械手的功率可以從幾百瓦到數(shù)千瓦不等���。較小尺寸�、低載荷要求的五軸機械手可能功率較低��,一般在數(shù)百瓦到數(shù)千瓦之間����。而大
發(fā)布時間:2023-09-16 點擊次數(shù):173
-
我們是一家專業(yè)從事注塑機機械手研發(fā)與生產(chǎn)的廠家���,為您帶來全新的高精度五軸注塑機機械手,在助您實現(xiàn)智能生產(chǎn)方面起到至關(guān)重要的作用�����!相比起傳統(tǒng)機械手�����,我們的五軸注塑機機械手更具五個優(yōu)勢:高精度�����、高速度、高可靠性����、高操作自由度和高靈活性�,可以滿足
發(fā)布時間:2023-06-09 點擊次數(shù):290
-
五軸機械手是目前常見的工業(yè)生產(chǎn)自動化設(shè)備之一,由于其使用頻率較高���,因此在長時間使用中���,不可避免地會出現(xiàn)各種問題。其中一種較為常見的問題是機械手Y軸過載�����,導致機械手不能正常運轉(zhuǎn)��。下面將介紹一些解決方案��,希望對您有所幫助�����。1.檢查機械手Y軸部
發(fā)布時間:2023-06-02 點擊次數(shù):647
-
五軸機械手是一種復雜的操控設(shè)備,其擁有五個關(guān)鍵的軸�����,分別是X軸�、Y軸、Z軸以及兩個旋轉(zhuǎn)軸���,這些軸各自都有著重要的作用���,下面我們來詳細了解一下各個軸的作用: X軸:X軸是機械手的水平軸,它的主要作用是允許機械手在水平方向上移動����,從而使
發(fā)布時間:2023-05-10 點擊次數(shù):392
-
怎么選擇五軸機械手軸承型號 選擇五軸機械手軸承型號需要考慮多方面的因素����,以下是一些重要的考慮因素: 軸承載荷:首先需要考慮的就是機械手的負載情況,包括水平和垂直方向上的負載�����。根據(jù)機械手的載荷情況,選擇能夠承受負載的合適軸承型號�。
發(fā)布時間:2023-04-28 點擊次數(shù):305
-
五軸機械手與六軸機器人的區(qū)別��? 五軸機械手和六軸機器人是兩種常用的工業(yè)自動化設(shè)備��,它們在結(jié)構(gòu)和功能上存在一些差異�?���! 〗Y(jié)構(gòu)上的區(qū)別: 五軸機械手通常由三個旋轉(zhuǎn)軸和兩個線性軸組成,旋轉(zhuǎn)軸可以實現(xiàn)水平��、垂直和旋轉(zhuǎn)運動��,線性軸可以實現(xiàn)前后
發(fā)布時間:2023-04-11 點擊次數(shù):161
-
五軸機械手和六軸機器人是現(xiàn)代工業(yè)中常見的自動化設(shè)備���。它們在生產(chǎn)線上自動化生產(chǎn)過程中發(fā)揮著重要的作用��。雖然它們都是機械臂類型的機器人��,但它們之間還是有一些區(qū)別的��?! ∈紫龋遢S機械手和六軸機器人的數(shù)量不同����。五軸機械手通常由五個旋轉(zhuǎn)關(guān)節(jié)組成
發(fā)布時間:2023-04-04 點擊次數(shù):305
-
五軸機械手堆疊怎么使用�? 五軸機械手堆疊是一種常見的自動化生產(chǎn)線設(shè)備��,它可以將物料自動堆疊到指定的高度和位置��。五軸機械手堆疊具有高效���、精準和節(jié)省人力成本等優(yōu)點���,因此在許多生產(chǎn)領(lǐng)域被廣泛應用?��! ∈褂梦遢S機械手堆疊需要注意以下幾個方面:
發(fā)布時間:2023-03-23 點擊次數(shù):89
-
五軸機械手怎么控制呢 五軸機械手的控制通常分為以下幾個步驟: 建立機械手模型:首先需要建立機械手的運動學模型���,包括各個關(guān)節(jié)的旋轉(zhuǎn)軸線�、關(guān)節(jié)長度��、關(guān)節(jié)角度范圍等參數(shù)�?��! ≡O(shè)計運動控制器:根據(jù)機械手的運動學模型��,設(shè)計控制器來控制機械手的
發(fā)布時間:2023-03-13 點擊次數(shù):124
-
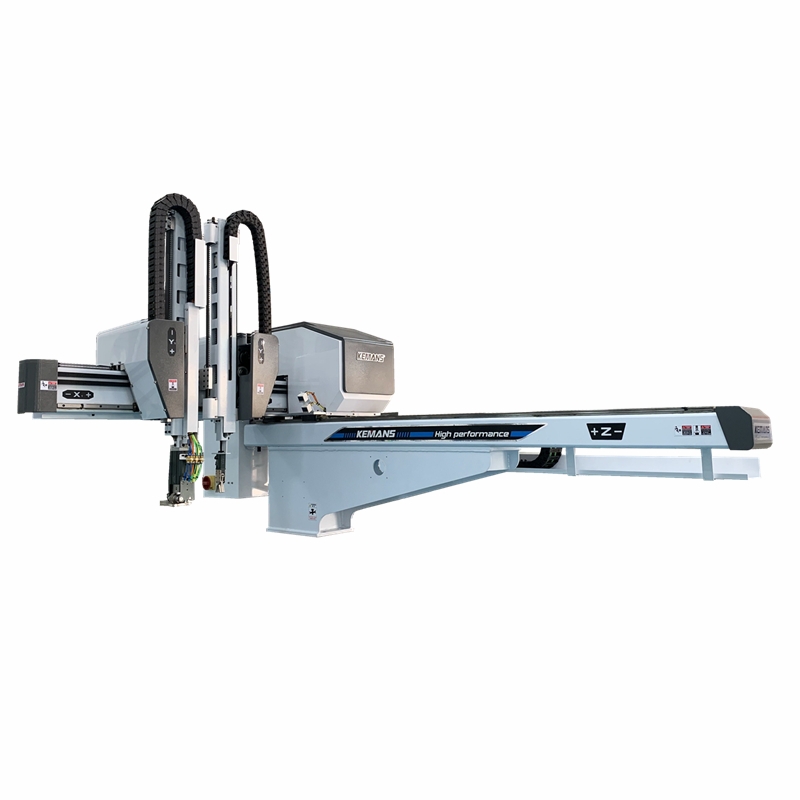
五軸機械手由4臺大功率伺服電機組成�����,可實現(xiàn)工件的定位�,保證設(shè)備運動軌跡的平穩(wěn)��。取臂采用特種鋁型材��,剛性和強度更強;機器人主體采用鋼結(jié)構(gòu),重約400kg��,采用數(shù)控折彎成型���。表面經(jīng)過噴塑處理��。不僅環(huán)保無污染���,而且機器人的外觀質(zhì)量耐磨、耐腐蝕�����。五
發(fā)布時間:2022-12-30 點擊次數(shù):83
-
科曼斯公司的機械手����,相信大家都比較了解,對于機械手國內(nèi)沒有幾家能這么專業(yè)���,我們專注注塑設(shè)備10余年�,成功服務1000+家企業(yè)�。對于機械手我們采用高效應AC伺服馬達驅(qū)動,對于五軸機械手下面一文來解答您的疑難����。機械手是早的工業(yè)機器人�,也是早的現(xiàn)
發(fā)布時間:2022-11-21 點擊次數(shù):78
-
在傳統(tǒng)的注塑工藝中��,從Z早期的手工成型�,到注塑機油壓成型,在今天計算機控制的成型工藝的演變中����,進步不僅體現(xiàn)在產(chǎn)品的工藝質(zhì)量、外觀����,以及成型效率上。注塑機的競爭越來越激烈����,五軸伺服機械手(雙切)���,適用于30~450T各種塑料水平注塑機���,有五軸
發(fā)布時間:2022-11-15 點擊次數(shù):77
-
在機械手行業(yè)也分為三軸、五軸�����、伺服系統(tǒng),機械手在食品行業(yè)深受大家的喜愛�。眾所周知我們注塑行業(yè)使用較多的是三軸機械手配合五軸機械手,它們是由執(zhí)行機構(gòu)�、驅(qū)動機構(gòu)和控制系統(tǒng)三大部分組成,代替人工進行自動切嘴和模具插片��、模具貼標�����、模具組裝��、塑料�、分
發(fā)布時間:2022-09-30 點擊次數(shù):80
-
五軸機械手的執(zhí)行部分可以根據(jù)控制中心的命令執(zhí)行命令,完成操作員指定的任務�����,并按期完成����。當用戶接收到任務時,只需在控制面板中輸入相應的任務值,即可觸發(fā)機器工作���。五軸機械手在產(chǎn)品結(jié)構(gòu)性能上有了很大的提高����,機械結(jié)構(gòu)的工藝和尺寸設(shè)計都更加合理高效����、
發(fā)布時間:2022-08-25 點擊次數(shù):223
-
三軸、五軸伺服機械手應安裝在金屬等阻燃的地方�����,因為機械手是電氣設(shè)備����,如果接觸可燃物會產(chǎn)生劇烈的化學反應,所以要特別注意安裝環(huán)境是否遠離可燃物���,消除潛在危險����。機械手可以通過其對周圍環(huán)境的準確感知��,并通過對相關(guān)數(shù)據(jù)的感知和分析��,識別采集到的各種
發(fā)布時間:2022-07-20 點擊次數(shù):114
-
根據(jù)不同的應用場所��,有上百種型號的產(chǎn)品供客戶選擇�����,如牛頭伺服機械手����、伺服機械手、三軸機械手�����、五軸機械手����、斜臂機械手、超低空間專用機械手等�。自然堂、玉蘭油等大客戶已使用多年���。機械手是用來輸送物料或運動部件的�����,它沒有旋轉(zhuǎn)的刀具主軸
發(fā)布時間:2022-03-25 點擊次數(shù):69
-
五軸機械手的主要活動考慮到用戶的安全需求����,選用橙黃色進行分配。橙色黃色能在很大程度上提醒用戶�����,確?����,F(xiàn)場操作人員注意使用安全���。機械手在機械制造業(yè)中應用廣泛����,發(fā)展迅速�����。目前主要用于機床����、橫向鍛壓機的裝卸,以及點焊�����、噴漆等��??砂匆?guī)定的操作程序
發(fā)布時間:2022-03-18 點擊次數(shù):99
-
什么是機械手堆棧?堆疊系統(tǒng)由多個成員設(shè)備組成。主交換機負責堆疊系統(tǒng)的運行����、管理和維護。其他成員設(shè)備在主交換機處理業(yè)務時作為備份設(shè)備�����。一旦主交換機發(fā)生故障��,系統(tǒng)會自動選擇新的主交換機���,保證業(yè)務不中斷��。一般的控制系統(tǒng)都有��。三軸直角坐標機械手
發(fā)布時間:2021-12-17 點擊次數(shù):328
-
五軸機械手如何選擇質(zhì)量好的�����?行業(yè)中有很多機械手可以選擇��,不同廠家的機械手不一樣�,價格也是不一樣的。機械手到底我們?nèi)绾芜x擇才能選擇自己心儀的呢�����?那下面跟著我們科曼斯機械手具體看下如何選擇吧����? 首先我們采購機械手的時候要明確選擇我們使用這
發(fā)布時間:2021-11-06 點擊次數(shù):137
-
機械手控制的要素包括工作順序、到達位置��、動作時間�、運動速度���、加減速度等。機械手的控制分為點位控制和連續(xù)軌跡控制兩種 在正常出產(chǎn)時由五軸機械手來取出制品��,注塑機周期固定��,制品穩(wěn)定性佳����,使質(zhì)量有確保�。五軸機械手進步工作效率,降低人工成本����。
發(fā)布時間:2021-10-11 點擊次數(shù):211
-
機械手在適當位置的控制系統(tǒng)類型也影響著可利用性。例如注塑機控制器綜合在一起的機械手控制器享有實現(xiàn)更多便利的普通顯示屏和實現(xiàn)較少通訊中斷的普通機械手控制器���。其它特點還包括有簡化機械手編程的預編程模板�����,以及使成型業(yè)者能直接與在線服務工程師聯(lián)
發(fā)布時間:2021-09-11 點擊次數(shù):153
-
隨著網(wǎng)絡技巧的發(fā)展����,機械手的聯(lián)網(wǎng)了操作問題也是以后發(fā)展的方向。工業(yè)機器人是近幾十年發(fā)展起來的一種高科技自動化生產(chǎn)設(shè)備���?�! ∪S�����、五軸機械手應安裝于金屬等阻燃物上���,因為機械手是通電設(shè)備,若與可燃物碰觸將產(chǎn)生劇烈化學反應����,因此特別注意安裝環(huán)
發(fā)布時間:2021-08-21 點擊次數(shù):160
-
該設(shè)備由五軸機械手、物料架����、顏色識別站、加工站���、沖床���、成品存儲臺六個加工工位組成�。以高速度裝入多個插件或在緊湊的模具空間中脫模復雜部件所需的多個動作����,能通過此附加軸變得更容易。對于次級操作如使部件邊緣通過高溫的夾具或者將部件放置在托盤中
發(fā)布時間:2021-08-03 點擊次數(shù):126
-
在偌大的格力生產(chǎn)車間以往人挨著人的、密集的工作場面已然消失不見取而代之的是整齊有序的自動化生產(chǎn)流程�����?�! ∫慌排诺墓I(yè)機器人運動靈活自如生產(chǎn)程序井井有條��,數(shù)字化控制的生產(chǎn)機組���。讓龐大的車間內(nèi)��,工人變得很少了這正是格力目前全力以赴的事情——
發(fā)布時間:2021-07-17 點擊次數(shù):175
-
在中�����、小零件的生產(chǎn)領(lǐng)域���,多工位壓力機的存在使得自動化設(shè)備可能無用武之地。無論是七軸機器人�����,還是各種各樣的機械手或多工位壓力機����,企業(yè)在項目初期進行設(shè)備選用時,要結(jié)合自身零件的特點��、現(xiàn)場安裝條件�����、投資成本等各種條件進行綜合考慮,好的自動化設(shè)
發(fā)布時間:2021-04-15 點擊次數(shù):450
-
五軸機械手的手臂部分可以在一個幾何平面內(nèi)自由移動���。機械手的前兩個關(guān)節(jié)可以在水平方向及豎直方向自由旋轉(zhuǎn),第三個關(guān)節(jié)可在第四個關(guān)節(jié)上水平移動����。這種獨特設(shè)計使機械手具有很強的剛性,用來投送物料或移動零件�����,并能將它放到領(lǐng)一個指定的地方,因此能夠
發(fā)布時間:2021-03-22 點擊次數(shù):253
-
為什么“五”這個數(shù)字比“三”和“六”好呢���?當涉及到機械手的運動軸時��,這個問題更容易解釋���。這些機械手比標準的三軸機械手更能干��,與六軸關(guān)節(jié)型機械手相比�����,往往更具成本效益�?! ∥遢S機械手機械結(jié)構(gòu)部分包括機
發(fā)布時間:2021-02-21 點擊次數(shù):710
-
在正常出產(chǎn)時由五軸機械手來取出制品��,注塑機周期固定�����,制品穩(wěn)定性佳��,使質(zhì)量有確保���?����! ≡跈C器操作時�,五軸機械手很好地替代人工進行運作,與工人手工運作相比較��,人會疲勞�����,而機械手能夠直工作下去�����,特別能在夜班時刻發(fā)揮大功能���?����! ∥遢S機械手進步工
發(fā)布時間:2021-01-12 點擊次數(shù):251
-
五軸機械手的電力驅(qū)動是機械手使用得較多的一種驅(qū)動方式��。其特點是電源方便�����,響應快�����,驅(qū)動力較大(關(guān)節(jié)型的持重已達400kg)����,信號檢測、傳動�、處理方便,并可采用多種靈活的控制方案��。驅(qū)動電機一般采用步進電機��,直流伺服電機(AC)為主要的驅(qū)動方
發(fā)布時間:2020-12-15 點擊次數(shù):263
-
五軸機械手為什么“五”這個數(shù)字比“三”和“六”好呢���?當涉及到機械手的運動軸時�,這個問題更容易解釋�����。這些機械手比標準的三軸機械手更能干���,與五軸機械手相比�,往往更具成本效益��?����! 〕尚蜕虒ψト『拖掠味ㄎ坏母呔扰c靈活性提出了越來越高的要求����。
發(fā)布時間:2020-12-14 點擊次數(shù):226
-
五軸機械手的靈活性越大,通用性越廣��,其結(jié)構(gòu)也越雜亂����。五軸機械手是近幾十年發(fā)展起來的一種高科技自動化出產(chǎn)設(shè)備它對安穩(wěn)、進步商品質(zhì)量進步出產(chǎn)功率改善勞作條件和商品的疾速更新?lián)Q代起著十分主要的作用���。五軸機械手包括多軸向伺服驅(qū)動在內(nèi)����,只需
發(fā)布時間:2020-11-26 點擊次數(shù):243
-
對不同模具和機器的適應性���。在軟件中重新編程伺服動作的能力對于要轉(zhuǎn)換工裝的訂制成型商尤為重要��?����! ∥遢S機械手是指伺服馬達數(shù)量���,3軸就是總共3個伺服馬達。以5軸為例:橫行使用1個伺服馬達���,1軸��;主臂用2個馬達:升降1個 在裝置����、配線、運
發(fā)布時間:2020-10-21 點擊次數(shù):211
-
五軸機械手適用于注塑成型時成品及水口料的取出,分為單截式與雙截式供客戶選擇����,適用于二板模、三板?����;驘崃鞯滥>?����。能實現(xiàn)各種特殊動作�,如排列���、堆放����、品檢和埋入等。適用于鎖模力在850T以下的射出成型機���。三軸�����、五軸機械手使用時有必要接地��,機械
發(fā)布時間:2020-09-08 點擊次數(shù):201
-
五軸機械手能模仿人手和臂的某些動作功能���,用以按固定程序抓取、搬運物件或操作工具的自動操作裝置�。機械手是早出現(xiàn)的工業(yè)機器人,也是早出現(xiàn)的現(xiàn)代機器人�,機械手,它可代替人的繁重勞動以實現(xiàn)生產(chǎn)的機械化和自動化���,能在有害環(huán)
發(fā)布時間:2020-07-21 點擊次數(shù):234
-
1�����、為五軸機械手供給動力來源的是動力單元以及驅(qū)動單元兩部分�。 2�、執(zhí)行組織單元為五軸機械手執(zhí)行部分,能依據(jù)操控中心指令來執(zhí)行指令��,完結(jié)操作人員指定任務��,而且按期完結(jié)�。當使用者接到任務時,只需求在操控面板輸入相應
發(fā)布時間:2020-05-12 點擊次數(shù):846
-
1.伺服主臂+1伺服料臂��,雙臂五軸伺服機械手 這種結(jié)構(gòu)是市面上常用的五軸機械手結(jié)構(gòu)����,首要用于冷流道三板模注塑自動化系統(tǒng)中。兩個伺服手臂中主臂擔任制品的取出���,也能夠用在埋鑲件系統(tǒng)中鑲件埋入并制品取出����;副臂則擔任撿水口?�! ?.雙主臂
發(fā)布時間:2020-03-03 點擊次數(shù):264
-
五軸機械手有幾大特征 斜臂式機械手的特征: ��、當夾持動作失利時���,只需將射出機安全門翻開,取出制品再關(guān)上安全門����,斜臂式機械手全部動作就可以自動康復正常,無需其他任何設(shè)定���?���! ?���、五軸機械手凹凸方位為可調(diào)式,加大上下行程間隔?! ⑽遢S機
發(fā)布時間:2019-12-26 點擊次數(shù):427
-
五軸機械手能仿照人的手和臂一些動作功用����,以按固定程序抓取、搬運物件或操作東西的主動操作設(shè)備���,而五軸機械手的五軸是哪五軸呢�?即這橫行使用1個伺服馬達�����,1軸;主臂用2個馬達:升降1個�、引拔1個,2軸;副臂用2個馬達:升降1個����、引拔1個,2軸
發(fā)布時間:2019-11-27 點擊次數(shù):1412
-
怎么做好五軸機械手的保養(yǎng)工作呢�����?這三方面是重要�! 雖然機械手的使用效果很好,但是因為是機械設(shè)備�,所以使用的時候頻率是很高的。一般情況下��,工業(yè)設(shè)備使用的頻率過高�����,就會影響使用壽命�����。所以��,為了讓機械手的使用壽命更加的好�����,就需要去做好保養(yǎng)工
發(fā)布時間:2019-10-28 點擊次數(shù):275
-
運用五軸機械手注意事項以下為你講解 最專業(yè)的五軸械手在諸多職業(yè)都得到廣泛運用�,因而年需求量也在節(jié)節(jié)攀升,在機械手快速發(fā)展中����,一方面是數(shù)量在劇增,另一方面更是機器生產(chǎn)技術(shù)在提升�����,在新機器撤銷舊機器景象下���,仍然不行忽視關(guān)于五軸械手安全運用
發(fā)布時間:2019-10-15 點擊次數(shù):417
-
五軸機械手具有哪些特點分類 在注塑機械手的分類中����,咱們常說的三軸����、五軸伺服機械手指的是伺服馬達的數(shù)量。3軸指這臺機械手有3個伺服馬達���,5臺是5個伺服馬達��。在實踐注塑自動化運用場景中�,咱們常說的五軸伺服機械手能夠有三種方式: 1.
發(fā)布時間:2019-09-16 點擊次數(shù):375
-
介紹五軸機械手的特點1、五軸機械手由機器準確操控����,因此能夠徹底按照工廠方案來操控產(chǎn)品產(chǎn)值,排除去人工不可確定性和失誤操作等因素�,對客戶有確定交貨期,能夠保持良好商譽和競爭力����。2、五軸機械手配備有安全防護體系�,最大程度上能夠規(guī)避職工意外損傷危
發(fā)布時間:2019-08-28 點擊次數(shù):336
-
感謝各位同仁一直以來對公司工作辛苦付出!“五一”國際勞動節(jié)即將來臨,根據(jù)國家法定“五一”勞動節(jié)假日�����,并結(jié)合公司實際工作安排��,現(xiàn)將2019年“五一”放假安排通知如下:一��、放假安排放假時間:5月1日~5月4日��,共4天(其中5.1為國家法定節(jié)假日
發(fā)布時間:2019-04-30 點擊次數(shù):265
-
使用五軸機械手注意事項 最專業(yè)的五軸機械手在許多工作都得到廣泛運用����,因此年需要量也在節(jié)節(jié)攀升,在機械手快速發(fā)展中���,一方面是數(shù)量在劇增�,另一方面更是機器生產(chǎn)技術(shù)在提高�,在新機器吊銷舊機器景象下,依然不行忽視關(guān)于五軸機械手安全運用�。 1
發(fā)布時間:2019-04-08 點擊次數(shù):552
-
眾所周知���,五軸機械手借助平衡原理實現(xiàn)對物體的推拉操作�,幫助工廠搬運��、拿取許多產(chǎn)品�,并且,在熟知五軸機械手是如何工作之后�����,操作起來也并不困難����,通過幾次使用很快便能夠熟練操作。下面廣東科曼斯機械手廠家的的五軸機械手具有以下優(yōu)勢:1��、作為廣東省內(nèi)
發(fā)布時間:2019-03-22 點擊次數(shù):198
-
五軸機械手是最早出現(xiàn)的工業(yè)機器人��,也是最早出現(xiàn)的現(xiàn)代機器人����,近年來,在注塑機作業(yè)得到了廣泛運用�,跟著注塑機技能和科技的疾速打開,工廠對自身自動化程度的需求也變得越來越高��。作業(yè)專家估計注塑機器人很快得到廣泛���。而五軸機械手臂將為注塑機作業(yè)完
發(fā)布時間:2019-02-15 點擊次數(shù):410
-
中小企業(yè)技改熱情不高有很多原因�,一方面是很多中小企業(yè)有在進行技改��,但是沒有告知經(jīng)信部門��,因而可能沒有統(tǒng)計完整�����,畢竟在當前的經(jīng)濟狀態(tài)下��,企業(yè)不進行技術(shù)改造進行轉(zhuǎn)型升級���,其很難生存;另一方面部分中小企業(yè)面臨資金難題���,融資難制約了技改,對整個市場
發(fā)布時間:2018-08-17 點擊次數(shù):329
-
自動沖壓生產(chǎn)線大多由一臺雙動拉伸壓力機或多連桿單動拉伸壓力機和4~5臺單動壓力機組成流水線����,生產(chǎn)大型車身覆蓋件,安全性高��,沖壓質(zhì)量好�����。生產(chǎn)線上布置自動化上下料系統(tǒng)���。東莞沖壓機器人生產(chǎn)廠家淺析五軸沖壓機器人的特點及
發(fā)布時間:2018-08-09 點擊次數(shù):197
-
1�、機器人效率高��。獨家(雙倍速)zhuanli設(shè)計大大提高了生產(chǎn)效率,大負載��、快速��、高長行程作業(yè)��,為企業(yè)解決了生產(chǎn)效率低的難的難題���。2�����、人性化安全系統(tǒng)���。機器活動的主要部件均采用了顏色進行搭配,以保證現(xiàn)場操作人員的安全使用��。3��、伺服系統(tǒng)與強電完全分開����,
發(fā)布時間:2018-07-04 點擊次數(shù):215
-
五軸機械手的控制器智能化體現(xiàn) 五軸機械手控制器擁有多種插補功能,在使用的過程中可以根據(jù)運動的需要進行插補命令�����,這個命令是由控制器內(nèi)部自行合成并且執(zhí)行的����,可以保證它在驅(qū)動器被可以呈現(xiàn)三種方式的插補控制(直線、圓弧與螺旋)���,同時��,五軸機械
發(fā)布時間:2017-11-21 點擊次數(shù):287
-
五軸機械手具有哪些特點 五軸機械手一般應用于對物體的抓取和搬運��,它是搬運大型物體的機械能手�,無論是將物體旋轉(zhuǎn)還是上下升降等����,它都是不可缺少的一個助手。在使用該機器之前����,對其特點有過全面了解后才能夠駕輕就熟,以下列出五軸機械手五大特點�����。
發(fā)布時間:2017-07-21 點擊次數(shù):401
-
五軸機械手的發(fā)展遠景 五軸機械手能仿照人的手和臂一些動作功用,以按固定程序抓取���、轉(zhuǎn)移物件或操作東西的自動操作設(shè)備�。機械手是最早出現(xiàn)的工業(yè)機械也是最早出現(xiàn)的現(xiàn)代機器人���,雖然有點粗笨��,卻能夠代替人的深重勞動以結(jié)束出產(chǎn)的機械化和自動化�����,能在
發(fā)布時間:2017-06-27 點擊次數(shù):227
-
科曼斯自動化機械科技有限公司,其主要生產(chǎn)注塑機機械手以及工業(yè)非標自動化設(shè)備��。是一家機械自動化設(shè)備研發(fā)�、制造、銷售��、服務為一體的高新科技企業(yè)�。公司產(chǎn)品廣泛應用于基礎(chǔ)工業(yè)、汽車及零配件�、工業(yè)電器�����、電子通訊、食品飲料����、醫(yī)
發(fā)布時間:2017-03-26 點擊次數(shù):426
-
五軸機械手操控器超越了單機的考慮方法,將三臺伺服融合在同一機座內(nèi)��,五軸機械手操控器同動無間操控����,具有強壯的靈敏操控性,精準操控�。五軸機械手操控器或兩軸伺服機械手操控器多種插補功用,依據(jù)運動需要插補指令由操控內(nèi)自行合成并同步履行�,可以直接在驅(qū)
發(fā)布時間:2017-01-09 點擊次數(shù):256
-
五軸機械手有幾大特征?斜臂式機械手的特征:1、當夾持動作失利時�,只需將射出機安全門翻開,取出成品再關(guān)上安全門���,斜臂式機械手悉數(shù)動作就可以主動恢復正常����,無需別的任何設(shè)定。2�����、五軸機械手凹凸方位為可調(diào)式�,加大上下行程距離。3�����、五軸機械手上下導桿
發(fā)布時間:2016-12-28 點擊次數(shù):259
-
五軸機械手有一種亂刀現(xiàn)象��,其因素是運用環(huán)境和運用年限的因素形成某些檢查信號反常�����,導致亂刀��,碰到此類疑問��,首先要依照邏輯判斷毛病元器件��,將其修正或替換后���,先要將刀庫中的一切刀具取出(從刀庫頂用東西取出或逐個換到主軸上手動取出)��,然后從主軸側(cè)逐
發(fā)布時間:2016-12-17 點擊次數(shù):334
-
五軸機械手在汽車行業(yè)有哪些應用?20世紀90年代以來��,大規(guī)模集成電路及計算機技能的迅猛開展使氣動機械手的制作技能日臻成熟�,機械手功能的改進和工作可靠性的進步以及其外形體積和報價的不斷下降,使其在轎車制工作中得到廣泛使用�。跟著機械手報價優(yōu)勢越
發(fā)布時間:2016-12-07 點擊次數(shù):332
-
五軸機械手的機體構(gòu)造:五軸機械手軸選用變頻馬達驅(qū)動,上下及引拔軸運用氣缸驅(qū)動�����。變頻橫走機械手��、上下手臂均運用進口的高剛性線性滑軌�����。引拔及上下運用質(zhì)量輕高剛性的鋁合金擠型梁合作線性軸承及高剛性軸承鋼��,能到達取出速度快��、高效能�����、轟動小����、運用壽命
發(fā)布時間:2016-11-26 點擊次數(shù):448
-
從各國的職業(yè)統(tǒng)計資料來看,近30多年來����,五軸機械手職業(yè)開展很快。20世紀70年代��,液壓與氣動元件的產(chǎn)量比約為9:1����,而30多年后的今日,在工業(yè)技能發(fā)達的歐美�、日本國家,該份額已到達6:4��,乃至挨近5:5��。我國的氣動職業(yè)起步較晚����,但開展較快。
發(fā)布時間:2016-11-16 點擊次數(shù):345
-
五軸機械手在注塑工藝方面有什么作用?立式機械手在注塑技術(shù)中的使用���。在傳統(tǒng)的注塑成型技術(shù)�����,由最早人工合模成型�����,到注塑機油壓合模成型��,在演變成今日電腦控制成型技術(shù)����,前進不僅反響在商品技術(shù)質(zhì)量�����、外觀�����,還有成型功率等�����。伺服機械手立式機械手在使用過程
發(fā)布時間:2016-11-04 點擊次數(shù):318
-
五軸機械手的功能是將工件從A處移送到B處�����。其操控請求如下:1、氣動機械手的升降和擺布移行分別由不同的雙線圈電磁閥來完成���,電磁閥線圈失電時能堅持本來的狀況���,有必要驅(qū)動反向的線圈才干反向運動;2���、上升�、降低的電磁閥線圈分別為YV2���、YV1�;右行
發(fā)布時間:2016-10-13 點擊次數(shù):251
-
五軸機械手為主動發(fā)明奇觀今注塑工業(yè)現(xiàn)已進入洗牌年代��、微利年代和轉(zhuǎn)型年代���,面臨“招工難�、人工高����、活動大”的用工環(huán)境����,面臨通貨膨脹���、經(jīng)濟不景氣的商場���,面臨注塑本錢不斷攀升,客戶請求越來越高����,競爭日趨激烈的年代,注塑公司只要改動傳統(tǒng)思路�,向內(nèi)部挖
發(fā)布時間:2016-09-19 點擊次數(shù):224
-
東莞五軸機械手是在機械化,自動化出產(chǎn)過程中開展起來的一種新型設(shè)備��。在現(xiàn)代出產(chǎn)過程中�����,機械手被廣泛的運用于自動出產(chǎn)線中���,機械人的研發(fā)和出產(chǎn)已成為高技能鄰域內(nèi),敏捷開展起來的一門新式的技能,它更加促進了機械手的開展���,使得機械手能非常好地完成與機
發(fā)布時間:2016-09-01 點擊次數(shù):252
-
伺服機械手是在機械化�����,自動化出產(chǎn)過程中開展起來的一種新式設(shè)備�。在現(xiàn)代出產(chǎn)過程中���,機械手被廣泛的運用于自動出產(chǎn)線中�����,機械人的研發(fā)和出產(chǎn)已成為高技能領(lǐng)域內(nèi)��,敏捷開展起來的一門新式的技能�����,它愈加促進了機械手的開展�,使得機械手能更好地完成與機械化和
發(fā)布時間:2016-08-20 點擊次數(shù):252
-
五軸機械手能仿照人的手和臂一些動作功用�����,以按固定程序抓取、搬運物件或操作東西的主動操作設(shè)備�����。機械手是最早呈現(xiàn)的工業(yè)機械也是最早呈現(xiàn)的現(xiàn)代機器人��,盡管有點粗笨��,卻可以代替人的繁重勞作以完結(jié)出產(chǎn)的機械化和主動化���,能在有害環(huán)境下操作以
發(fā)布時間:2016-07-30 點擊次數(shù):263
-
1使用要求分析 對于選型的人員首先要有物理運動學基礎(chǔ)��,材料力學基礎(chǔ)���,伺服驅(qū)動器使用和數(shù)控系統(tǒng)的應用經(jīng)驗,伺服機械手,三軸機械手,五軸機械手,機械手但最主要是把用戶的問題和要求等了解清楚����。對于簡單任務和有經(jīng)驗的工程師通過電話和郵件就可
發(fā)布時間:2016-07-11 點擊次數(shù):424
-
科曼斯自動化機械科技有限公司首要出產(chǎn)注塑機機械手以及工業(yè)非標自動化設(shè)備。是一家機械自動化設(shè)備研制����、制作���、出售�����、服務為一體的高新科技企業(yè)�。公司商品廣泛使用于基礎(chǔ)工業(yè)、轎車及零配件�����、工業(yè)電器����、電子通訊、食品飲料����、醫(yī)療、玩具���、化妝
發(fā)布時間:2016-06-27 點擊次數(shù):214
-
中小企業(yè)技改熱情不高有很多原因�����,一方面是很多中小企業(yè)有在進行技改���,但是沒有告知經(jīng)信部門��,因而可能沒有統(tǒng)計完整�����,畢竟在當前的經(jīng)濟狀態(tài)下���,企業(yè)不進行技術(shù)改造進行轉(zhuǎn)型升級,其很難生存;另一方面部分中小企業(yè)面臨資金難題����,融資難制約了技改,對整個
發(fā)布時間:2016-05-21 點擊次數(shù):323
-
科曼斯通用機械設(shè)備告訴你����,遇到五軸機械手出現(xiàn)毛病改如何解決,如何延長他的使用壽命�����。其呈現(xiàn)毛病如何檢查呢?查看自動化五軸機械手設(shè)備的傳感器方位是不是呈現(xiàn)偏移��。因為設(shè)備保護人員的疏忽�,也許某些傳感器的方位呈現(xiàn)差錯,呈現(xiàn)誤差及時調(diào)理�����,傳感器假
發(fā)布時間:2016-04-26 點擊次數(shù):265
-
五軸機械手是能模仿人手和臂的某些動作功能����,固定程序抓取、搬運物件或操作工具的自動操作裝置�����。它可代替人繁重的體力勞動以實現(xiàn)生產(chǎn)的機械化和自動化�����,能在有害環(huán)境下操作以保護人身安全�,因而廣泛應用于機械制造、冶金���、電子�����、輕工和原子能等部門�。五軸
發(fā)布時間:2016-04-19 點擊次數(shù):233
-
五軸機械手對機械手的可靠性和售后服務質(zhì)量的評價。和其他機械設(shè)備一樣�,機械手上適用的零部件也會呈現(xiàn)毛病,所以要仔細觀察保修期限���,評價保修期時�����,不單單要查詢主關(guān)零部件的期限�,特別要查詢那些不在質(zhì)保范圍內(nèi)的易損零件的晶牌����,一臺三年質(zhì)保期的機械
發(fā)布時間:2016-03-26 點擊次數(shù):270
-
五軸機械手標準選用進口變頻馬達驅(qū)動,工作平穩(wěn)而經(jīng)濟����。可選購AC伺服馬達驅(qū)動�,工作速度快而精準,定位精度達±0.1MM; ●橫行���、上下���、引拔臂選用高剛性精細直線線性滑軌�����,耐磨耗��,低噪音。平穩(wěn)壽命長�; ●雙截式上下手臂選用質(zhì)量輕、高剛
發(fā)布時間:2016-03-19 點擊次數(shù):346
-
目前國內(nèi)氣動五軸機械手發(fā)展趨勢主要有以下幾點: 1����、五軸機械手的重復精度將越來越高?! ?、模塊化���。模塊化組裝的五軸機械手能使同一五軸機械手動作自若并能夠完結(jié)運用不一樣的模塊而具有不一樣的功用��?! ?���、節(jié)能化��?����! ?�、機電一體化。由“
發(fā)布時間:2016-03-02 點擊次數(shù):260
-
在如今這個追求機械化和自動化的年代�,五軸機械手的使用是一個必定的趨勢。如今越來越多的公司也都開始有了機械手的使用�����,實踐也證實機械手的使用讓許多職業(yè)在出產(chǎn)功率和商品的質(zhì)量上都有了必定的提高�����?��! ∥遢S機械手作為機械手商品中備受重視的一種�,在
發(fā)布時間:2016-01-09 點擊次數(shù):247
-
五軸機械手的伺服操控級地由一組伺服操控系統(tǒng)構(gòu)成�,每一個伺服操控系統(tǒng)別離驅(qū)動操作機的一個關(guān)節(jié)。關(guān)節(jié)運動參數(shù)來自主操控級的輸出���。首要構(gòu)成部分有以下幾個�。 1����、電伺服驅(qū)動器一般由伺服電動機、方位傳感器�、速度傳感器和制動器構(gòu)成。伺服電動機的輸
發(fā)布時間:2016-01-09 點擊次數(shù):306
-
五軸機械手是最早出現(xiàn)的工業(yè)機器人�����,也是最早出現(xiàn)的現(xiàn)代機器人���,近年來,在注塑機工作得到了廣泛運用����,跟著注塑機技術(shù)和科技的疾速展開,工廠對本身自動化程度的需要也變得越來越高�。工作專家估量注塑機器人很快得到廣泛。而五軸機械手臂將為注塑機工作完
發(fā)布時間:2015-11-05 點擊次數(shù):218
-
五軸機械手在現(xiàn)代化工業(yè)生產(chǎn)及運送中起到了非常大的效果�����,它的高效長時作業(yè)節(jié)省了很大的勞動力資本����?���?墒窃俑叨说臋C器����,毛病仍是有的。當五軸機械手刀庫換刀出現(xiàn)毛病了咱們該怎么辦�?下面小編來給大家細心的剖析一下?�! ?��、假設(shè)五軸機械手在換刀過程中
發(fā)布時間:2015-11-05 點擊次數(shù):253
-
跟著科學技術(shù)的開展�,五軸機械手也不斷增加的地被運用。在機械工業(yè)中�,運用注塑機五軸機械手的意義有哪呢? 1�、以改善勞作條件,避免人身事故 在高溫����、高壓、低溫���、低壓��、有塵埃�����、噪聲�����、臭味���、有放射性或有別的毒性污染以及工作空間狹窄的場合中����,
發(fā)布時間:2015-11-05 點擊次數(shù):329
-
五軸機械手是在自動化設(shè)備的基礎(chǔ)上����,依據(jù)沖壓生產(chǎn)特點����,專門為完成沖壓自動化無人生產(chǎn)而研制的設(shè)備。五軸機械手為適應柔性化的生產(chǎn)請求���,壓力機的一切操控功用應做到集成化��,然后完成全套模具的菜單化辦理��,首要包含滑塊行程調(diào)整�、平衡器氣壓的調(diào)整、氣墊
發(fā)布時間:2015-11-05 點擊次數(shù):332
-
跟著塑料加工職業(yè)在中國的迅速開展���,注塑成型設(shè)備的自動化程度也越來越高?,F(xiàn)代化的注塑機常常裝備有機械手��,以進步出產(chǎn)功率���。五軸機械手是可以模仿人體上肢的有些功用�����,可以對其進行自動控制使其依照預訂請求運送成品或料理工具進行出產(chǎn)操作的自動化出產(chǎn)
發(fā)布時間:2015-11-05 點擊次數(shù):261
-
五軸機械手所用的驅(qū)動組織主要有4種:液壓驅(qū)動�、氣壓驅(qū)動�����、電氣驅(qū)動和機械驅(qū)動��。其間以液壓驅(qū)動、氣壓驅(qū)動用得最多����。下面是小編一一為我們介紹這4種驅(qū)動式 1、液壓驅(qū)動式 液壓驅(qū)動式五軸機械手一般由液動機(各種油缸���、油馬達)�、伺服閥�����、油泵�����、
發(fā)布時間:2015-11-05 點擊次數(shù):320
-
自動化設(shè)備五軸機械手是近幾十年發(fā)展起來的一種高科技自動化出產(chǎn)設(shè)備�����,它的特色是可通過編程來完結(jié)各種預期的工作使命��,在結(jié)構(gòu)和性能上兼有人和機器各自的長處����,特別表現(xiàn)了人的智能和適應性?�! ∥遢S機械手主要由手部和運動組織構(gòu)成�。手部是用來抓持工件
發(fā)布時間:2015-11-05 點擊次數(shù):212
-
跟著塑料加工行業(yè)在中國的迅速開展,注塑成型設(shè)備的自動化程度也越來越高?,F(xiàn)代化的注塑機常常裝備有五軸機械手,以進步出產(chǎn)功率����。注塑五軸機械手是可以模仿人體上肢的部分功用,可以對其進行自動控制使其依照預訂請求運送成品或料理東西進行出產(chǎn)操作的自
發(fā)布時間:2017-08-31 點擊次數(shù):338













 724小時服務支持
724小時服務支持
 型號齊全可非標定制
型號齊全可非標定制
 機械手源頭生產(chǎn)廠家
機械手源頭生產(chǎn)廠家
 做工精密 壽命長
做工精密 壽命長